变频器的闭环控制
文章9
我们已经提到过几次如何使用闭环控制来保持恒定的温度,压力等,以及大多数变频器是如何在变频器中内置此功能的,因此几乎不需要外部器件。让我们详细了解一下。
首先,让我们谈谈开环和闭环控制之间的区别。如果我们使用泵来维持压力,则可以将泵的速度设置为我们认为可以完成的速度,并希望达到最佳状态,甚至在晚上将其调低一点。这是一个开环控制。
更好的解决方案是安装压力传感器,并将其连接到控制泵的变频器。现在,变频器会将这个实际(即测得)的压力值与所需的压力值(设定值)进行比较,并会连续调整泵的速度以将压力保持在此水平(假设您已正确设置)。由于压力传感器的连接完成了回路(变频器–电机–泵输出–变送器–变频器),因此该系统称为闭环控制系统,如图1所示。
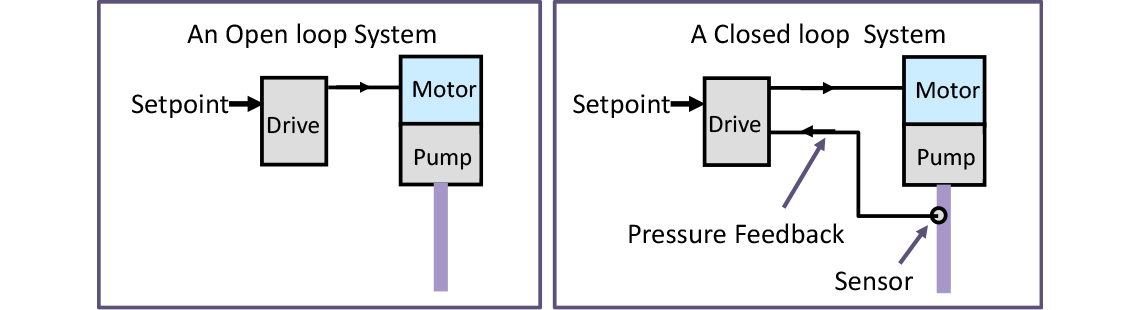 图-1 开/闭环控制系统
图-1 开/闭环控制系统
从飞机稳定系统到绕线系统中的张力控制,以及在保持压力,流速,速度或温度等更明显的应用中,闭环控制无处不在。
闭环控制的关键问题是稳定性。如果您试图控制一艘狭窄的船,您将了解这一点;拉舵柄,什么也没发生;你再拉一点,船就开始转弯。您回退舵柄,但是船继续转弯。您用另一种方法用力拉,最终将其拉直。沿着运河振荡,直到您掌握了系统的延迟。在闭环系统中,可以通过仔细处理误差来建立稳定性。误差是设定值(期望值)和实际(反馈)值之间的差。该误差适用于控制系统–船上的操纵杆,或工业上的变频器。因此,在狭窄的船上,船指向的位置(实际值)和沿运河的正下方(设定点)的差就是误差。
在典型的变频器应用中,可以通过模拟输入或固定值来设置设定值(例如压力),而实际值可以通过连接到另一个模拟输入的压力传感器来设置。然后,该误差会不断调整电机速度。现在要获得良好的控制和稳定性,您需要处理误差信号。在狭窄的船上,您很快就学会不要将舵柄转动得太快,并放慢对误差的反应。变频器通过控制误差信号的比例增益和积分(滤波值)来实现此目的。误差的微分值很少使用,但是比例,积分和微分这三个术语是闭环控制系统的代名词;PID系统。
让我们仔细看看。如果我们将误差乘以一个常数,则代表增益。如果此常数是一个很高的值,那么误差会很小,我们将在狭窄的船上将舵柄摇晃。显然潜在地不稳定。如果常数是一个低值,我们的响应将不足以纠正误差。
如果现在通过积分误差来添加一个“阻尼”因子,这将减慢系统的响应速度,这在控制时间以秒为单位的狭窄船只上很有用。再次,积分项太高,响应将太慢;值太低,我们将再次振荡,因为系统阻尼不足。
如果我们区分错误信号,这将对必须限制过冲的一些系统有所帮助,但这是非常不寻常的。
显然,窄船的P,I和D值将与快速系统(例如,绕线机张力控制)的P,I和D值不同。因此,变频器中的通用控制系统允许设置P,I和D值,从而几乎可以稳定任何闭环系统。图2显示了在典型的PID系统中如何处理错误。
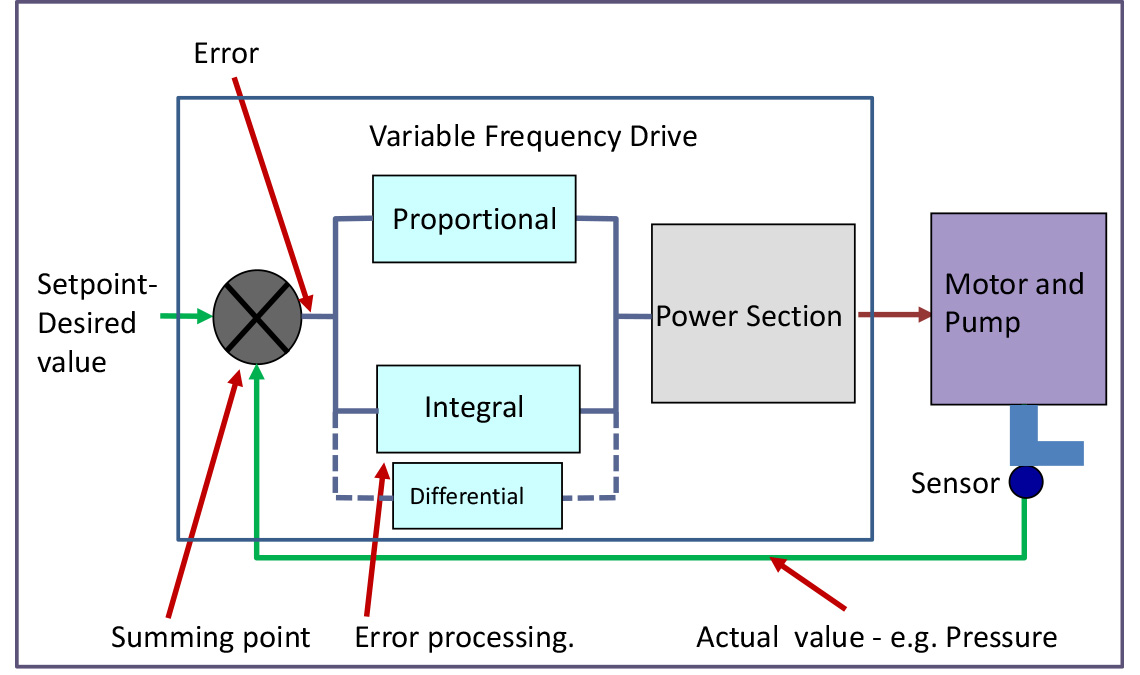 图-2 错误处理
图-2 错误处理
在实践中,我们如何使用变频器?我们在变频器中内置了PID控制器(或E3变频器上的PI控制器),因此我们只需要合适的传感器或反馈信号即可控制变量。像大多数工程学一样,如果基础知识正确,其余的工作就很简单。确保来自传感器的反馈信号能够为您提供期望的值,并确保在加速和减速电机时,电机以可预测的方式变化。首先开环运行系统以进行检查。如果传感器信号为2.3至5.7V,则可以相应地缩放与其连接的模拟输入。如果传感器电压随着电机速度的增加而增加,则很好;如果它掉落(也许您正在使用真空泵),则需要更改参数(E3上的P-43,P2和Eco上的P3-04)以告诉变频器以这种方式工作。您还可以更改反馈信号和设定值信号的来源,这样设定值可以来自固定的存储值。
一旦传感器信号看起来不错,就可以在变频器中启用闭环控制并查看会发生什么(E3上的P-12 = 5,P2和Eco上的P1-12 = 3)。 它可能会保持良好和稳定,不需要任何调整。如果不稳定,您可以尝试调整P和I项;如前所述,通常不需要D项。在E3变频器上,P和I分别通过参数P-41和P-42进行调整。在P2和Eco P3-01,P3-02和P3-03上调整P,I和D –所有闭环参数均为P3-XX组。
一个建议是增加P项直到其振荡,将其稍微回退并增加一点I。这有点像妖术,但是不要偏离默认设置太远并且可以从经验中学习。控制狭窄的船可能会比较困难,但至少您可以在酒吧停下来沉醉一下。
闭环控制通常用于控制温度,压力或流速的应用中,但是还有许多其他应用; 例如,在缠绕系统中保持张力,如图3所示。跳动臂移动电位器,该电位器产生一个信号,指示被缠绕材料的张力。这被反馈到变频器,该变频器调整卷绕机的速度以保持张力恒定。
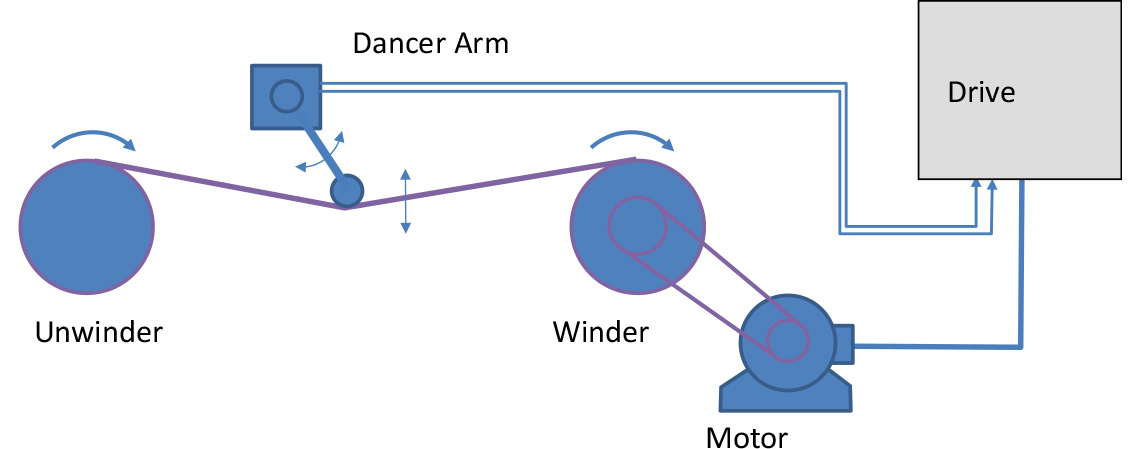 图-3 绕组应用中的张力控制
图-3 绕组应用中的张力控制
在Eco和P2变频器上,还有一些其他有用的参数。可以关闭斜坡以提高响应速度,可以设置各种限制,如果出现诸如爆管的问题,变频器可以检测到并关闭它,而不是平整运转并淹没该位置。Eco变频器具有其他功能,例如级联控制和PID休眠功能。这些参数是通用闭环控制器的实用补充。
许多变频器应用是在开环或与其他控制系统结合使用的,但是对于简单的应用,内置的闭环控制可能非常有用。